
 产品:33
产品:33
 联系我们
联系我们

发那科机器人输入输出信号板及更换
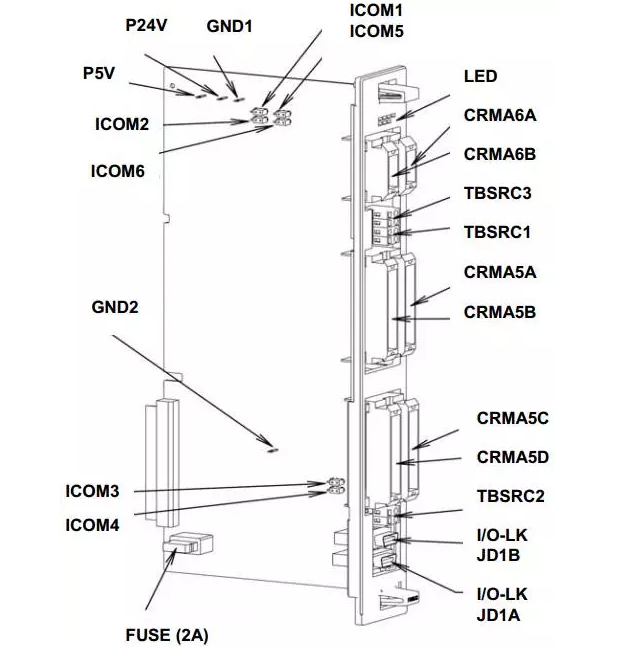
1 I/O信号JA板(A16B-2204-0010)
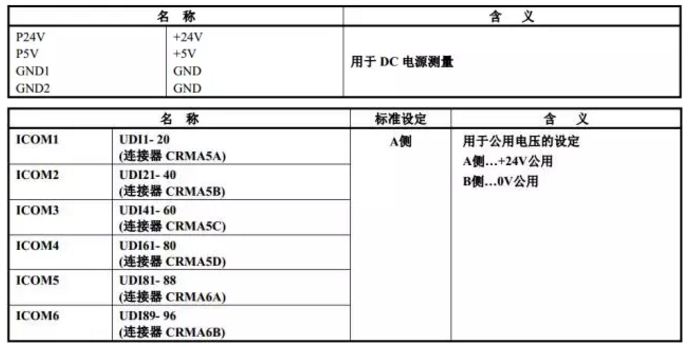
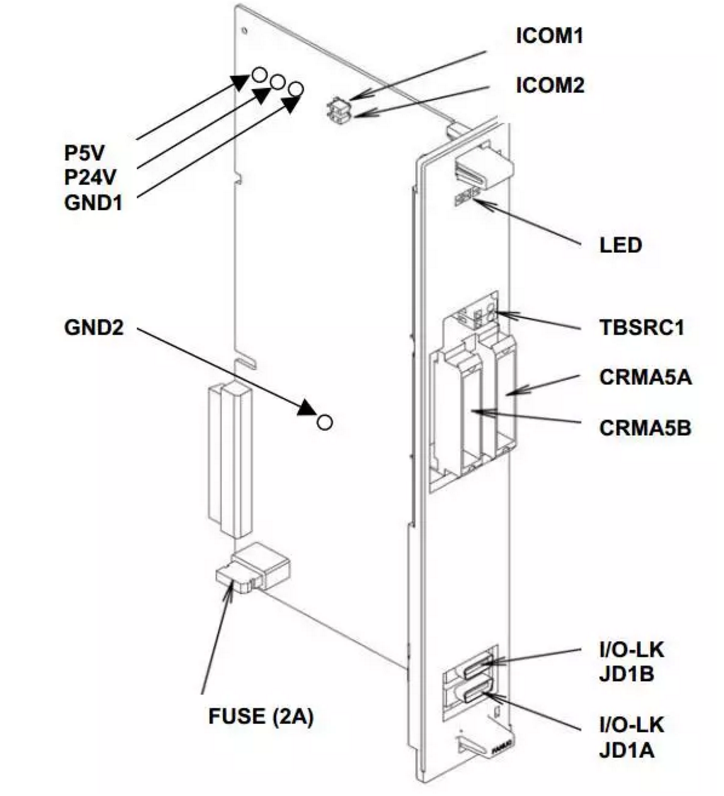
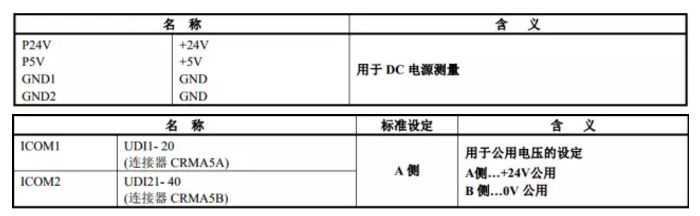
1.1 JA信号板主要接口定义
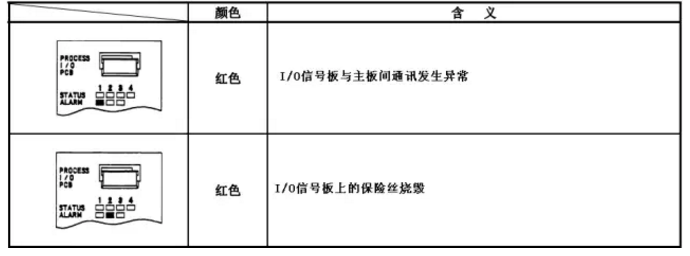
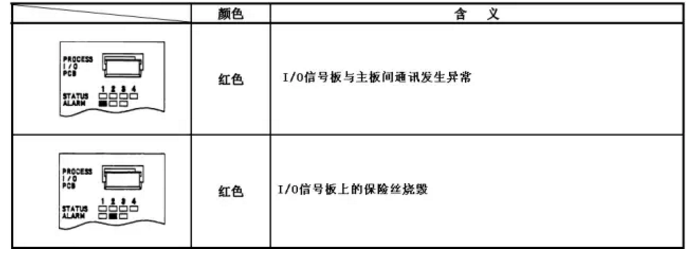
1.2 红色故障灯LED含义
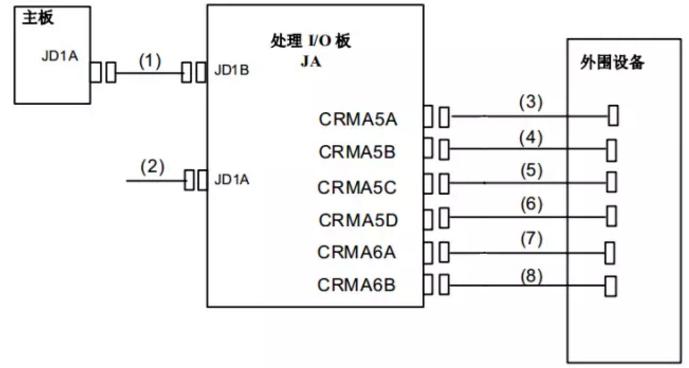
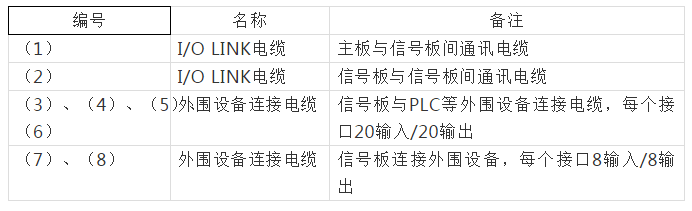
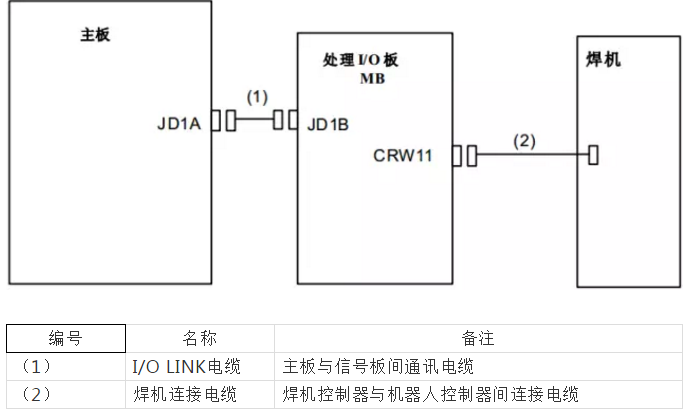
1.3 连接方框图
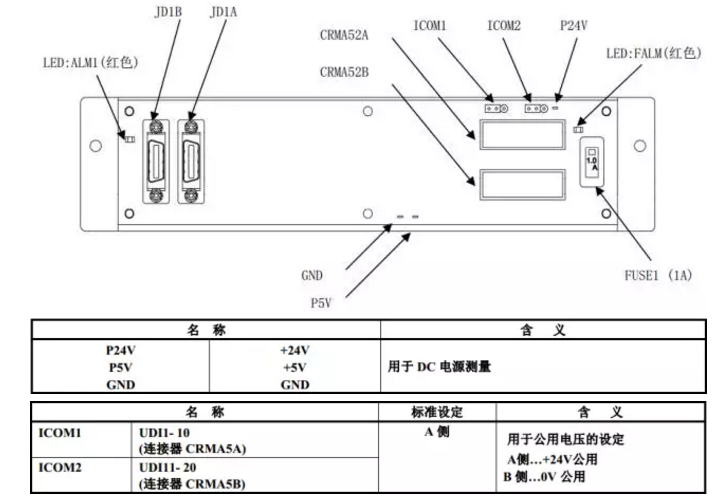
2. I/O信号JB板(A16B-2204-0011)
2.1 JB信号板主要接口定义
2.2红色故障灯LED含义
2.3连接方框图
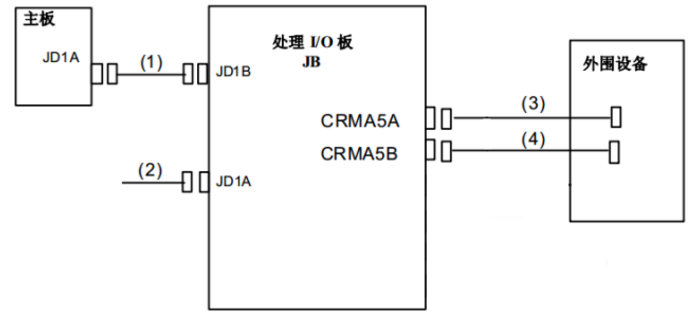
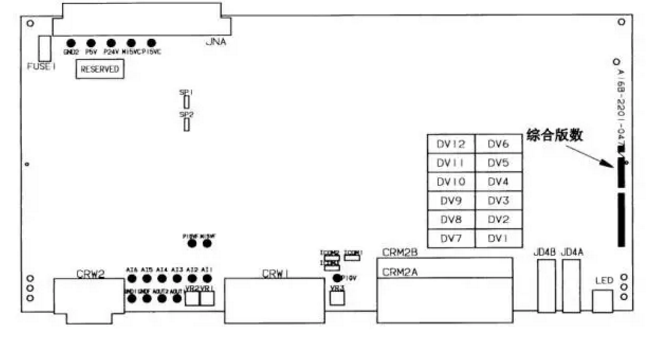
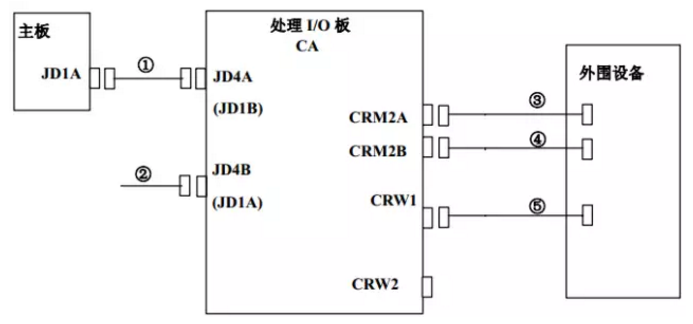
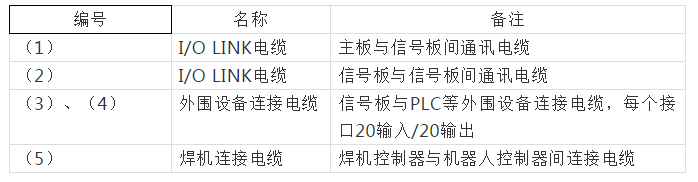
3. I/O信号CA板(A16B-2201-0470)
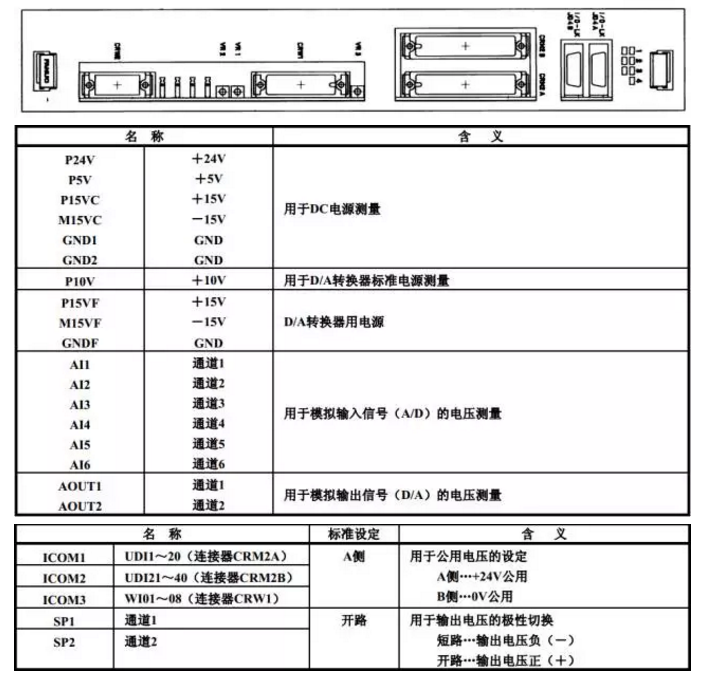
3.1 CA信号板主要接口定义
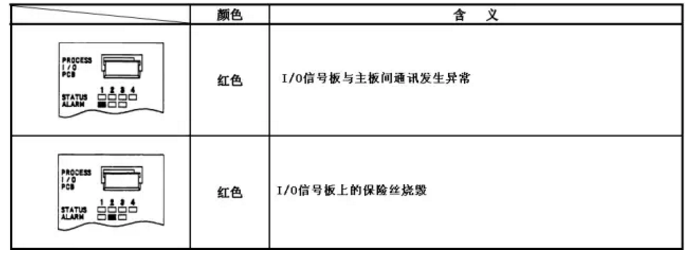
3.2 红色故障灯LED含义
3.3 调节
VR1:模拟量输出通道1的增益调节
操作TP使得AOUT[1]=4095,将数字电压表的“-”极连接到GNDF上、“+”极
连接到AOUT1,一边调节VR1使得数字电压表上显示12.0V。
VR2:模拟量输出通道2的增益调节
操作TP使得AOUT[2]=4095,将数字电压表的“-”极连接到GNDF上、“+”极
连接到AOUT2,一边调节VR1使得数字电压表上显示12.0V。
VR3:D/A转换器基准电压的调节
用数字电压表测量P10V,一边调节VR3使得数字电压表上显示10.0V。
3.4连接方框图
4. I/O信号MA板(A20B-2004-0380/0381)
4.1 MA信号板主要接口定义
4.2 红色故障灯LED含义

4.3 连接方框图

5. I/O信号MB板(A20B-2101-0730/0731)
5.1 MB信号板主要接口定义
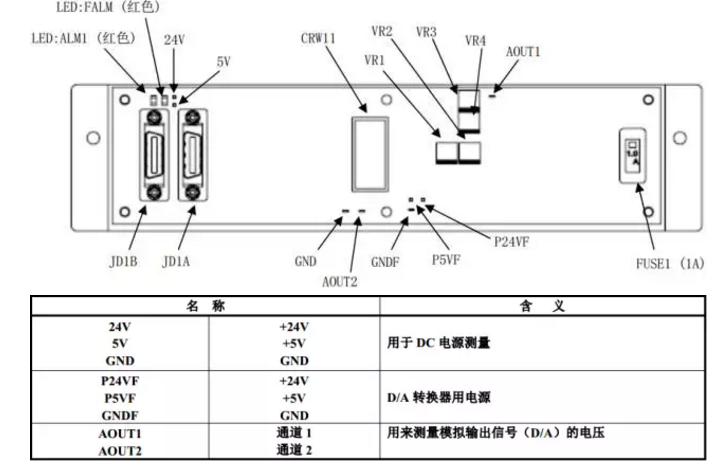
5.2 调节
VR1/VR2:模拟量通道1的增益和偏置
操作TP使得AOUT[1]=3413,将数字电压表的“-”极连接到GNDF上、“+”
极连接到AOUT1,一边调节VR1和VR2使得数字电压表上显示15.0V。
VR3/VR4:模拟量通道2的增益和偏置
操作TP使得AOUT[1]=3413,将数字电压表的“-”极连接到GNDF上、“+”
极连接到AOUT2,一边调节VR3和VR4使得数字电压表上显示15.0V。
5.3红色故障灯LED含义

5.4连接方框图
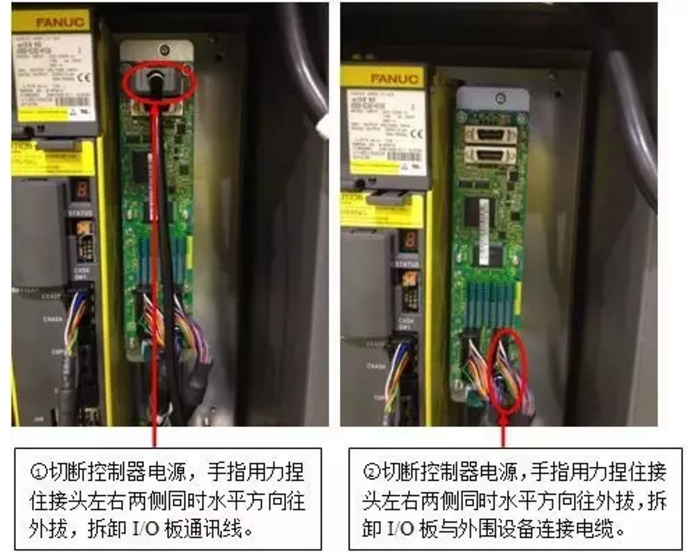
6. I/O信号板及保险丝更换
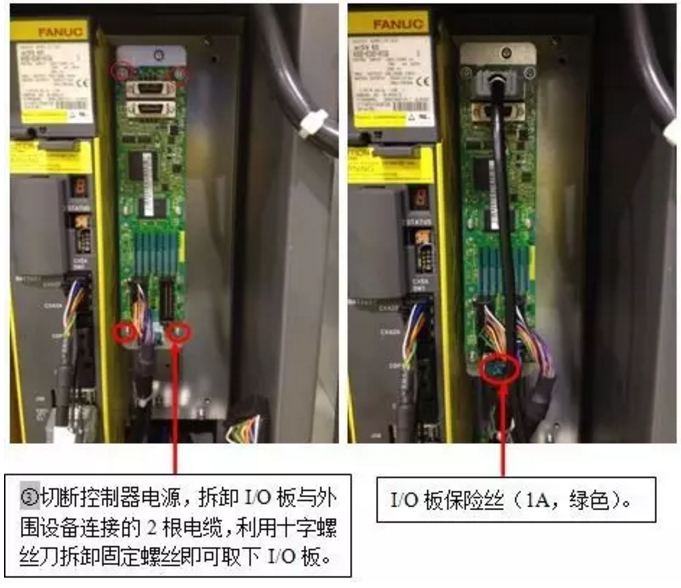
6.1 I/O信号板JA/JB/CA

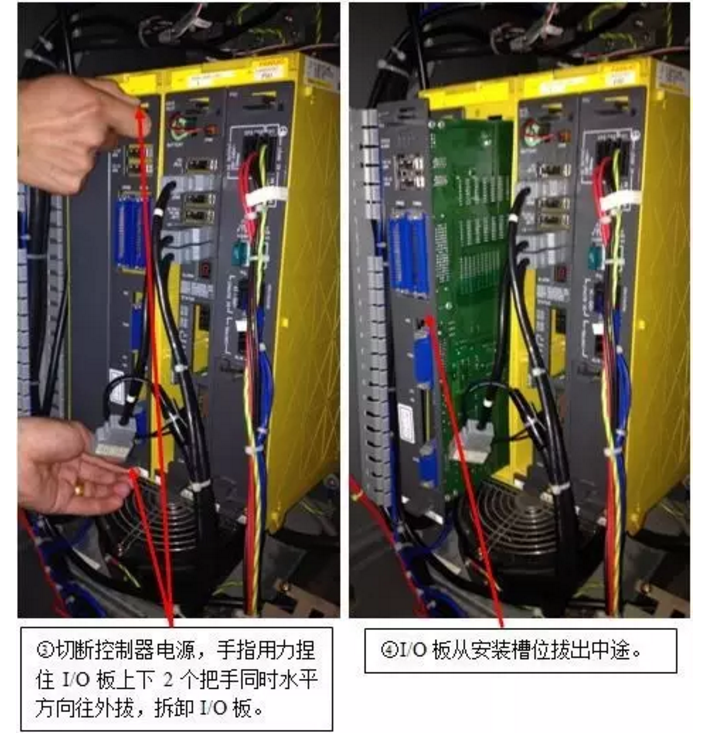
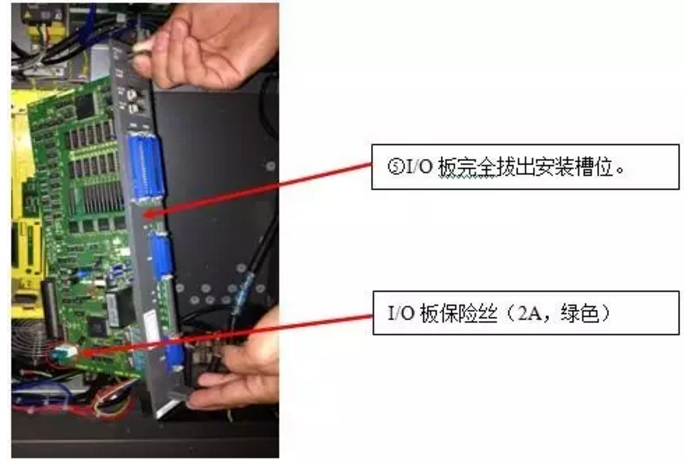
I/O板安装时按上图中方法倒序进行,将I/O板和各接头水平方向往里推(确认板子安装可靠,各电缆接头可靠连接)。
6.2 I/O信号板MA/MB
MA/MB信号板一般安装在机器人控制器A型柜和MATE柜内,更换I/O板上保险丝不用拆卸其他部件,打开控制柜门后可直接拆卸。
I/O板安装时按上图中方法倒序进行,将I/O板和各接头水平方向往里推(确认板子固定螺丝可靠紧固,各电缆接头可靠连接)
以上内容转载于网络
更多:发那科机器人