
 产品:33
产品:33
 联系我们
联系我们

发那科机器人奇异点异常报警方法处理解析
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
调试机器人时,如果发那科机器人处于如下状态(J4轴与J6轴同轴),则报警:motn-023或motn-063。在这种情况下,机器人只能在关节坐标系中运动。下面的姿势是单数。声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除


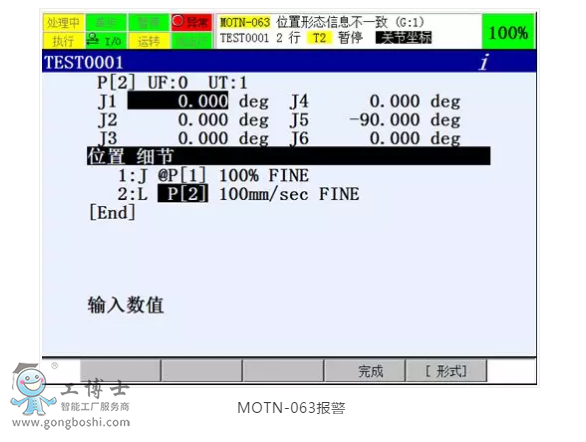
当机器人执行动作类型L、C、A的动作指令时,如果需要通过奇异点,机器人将显示motn-063报警
处理奇异点
案例1:机器人教学过程中遇到奇点
处理步骤:
A)将机器人的教学坐标系切换到关节上

B)对于点移动机器人,从0°位置调整J5轴,建议小于-3°或大于3°
C)按复位按钮复位报警
情况2:在程序运行时遇到奇点
方法一:适用于无精细点位置要求的场合。
当运行程序遇到奇异点时,可以将这一行的动作指令的动作类型改为J,或者修改机器人的位置和姿态,以避免路径上的奇异点。
以上就是发那科奇异点的报警处理方法解析;
更多机器人咨询请点击:http://fanake360.gongboshi.com/